CAN-Bus: Eine klare Erklärung mit allen Varianten
Der CAN-Bus, ausgeschrieben Controller Area Network, verbindet elektronische Steuergeräte in Fahrzeugen und Maschinen. Er überträgt Daten zuverlässig und reduziert den Verkabelungsaufwand. Die Technik basiert auf einem robusten Kommunikationsprinzip, das mehrere Geräte gleichzeitig einbindet. In diesem Artikel erklären wir das Bussystem, erörtern die verschiedenen Varianten und geben alle Infos, die man für den Einstieg wissen muss.
Was ist der CAN-Bus?
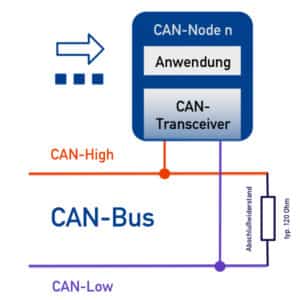
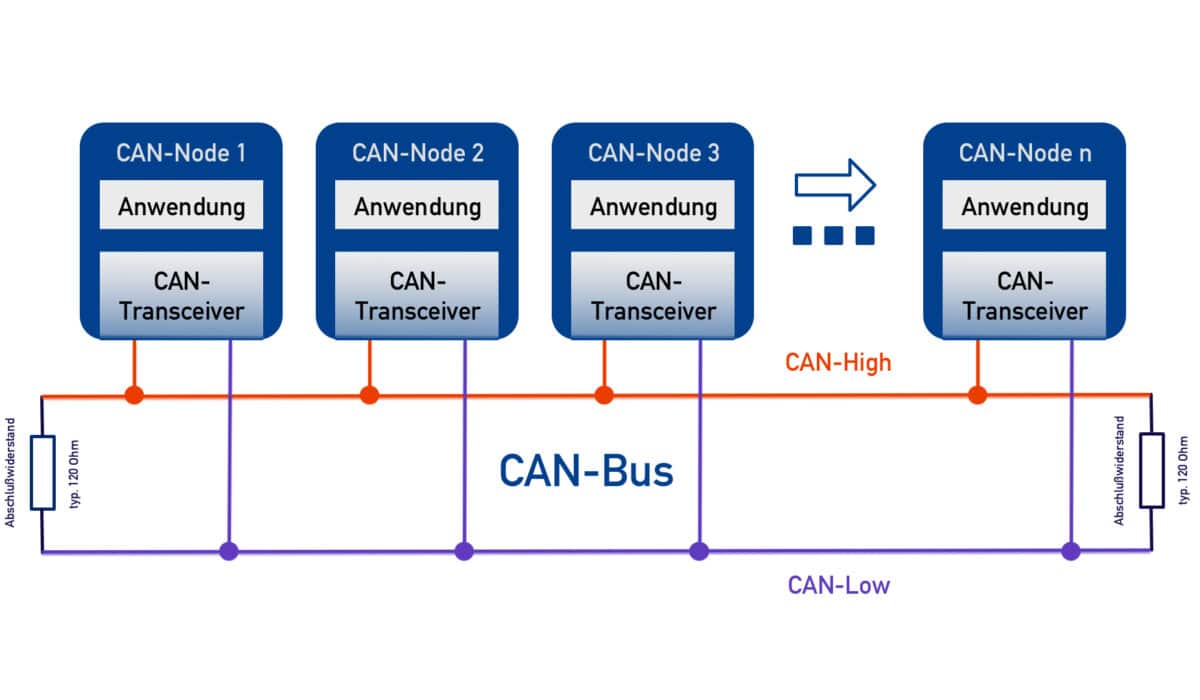
Der CAN-Bus ist ein serielles Bussystem, das Nachrichten zwischen Steuergeräten austauscht. Jedes Gerät sendet und empfängt Daten, ohne dass ein zentrales Steuergerät erforderlich ist. Die Übertragung erfolgt über zwei verdrillte Leitungen, CAN-High und CAN-Low, wodurch elektromagnetische Störungen minimiert werden.
Abschlußwiderstände
Die Busterminierung verhindert Signalreflexionen und sichert eine stabile Datenübertragung. An beiden Enden des Busstrangs wird jeweils ein Widerstand von typ. 120 Ohm eingesetzt, sodass die Leitung elektrisch abgeschlossen ist. Diese Widerstände verbinden CAN-High und CAN-Low, wodurch die Impedanz konstant bleibt und die Signalqualität erhalten wird.
Wie funktioniert der CAN-Bus?
Die Kommunikation nutzt Nachrichten mit eindeutigen Kennungen. Alle angeschlossenen Geräte lesen diese Kennungen und entscheiden, ob die Daten relevant sind. Die Priorität wird durch die Kennung festgelegt, sodass wichtige Informationen bevorzugt übertragen werden. Fehlererkennung und Fehlerkorrektur sind integriert, um die Zuverlässigkeit zu sichern.
Aufbau einer CAN Nachricht
Eine Nachricht besteht aus klar definierten Feldern, die in einer festen Reihenfolge angeordnet sind, damit die Kommunikation störungsfrei funktioniert. Der Aufbau ist in die Formate Basis und Extended unterteilt. Geräte, die CAN 2.0B unterstützen, können beide Formate verarbeiten, während Geräte mit CAN 2.0A Nachrichten mit Extended-Identifier ignorieren.
CAN2.0A Nachricht - Basis-Frame
Der Standard-Frame nach ISO 11898-1 verwendet einen 11-Bit-Identifier. Dieser Identifier erlaubt 2.048 verschiedene Kennungen. Dieses Format wird häufig in klassischen Fahrzeugnetzwerken eingesetzt, da es für viele Anwendungen ausreicht.
| SOF | Identifier | RTR | IDE | r0 | DLC | Data | CRC | ACK | EOF+IFS |
|---|---|---|---|---|---|---|---|---|---|
| 1 Bit | 11 Bit | 1 Bit | 1 Bit | 1 Bit | 4 Bit | 0..8 Byte | 16 Bit | 2 Bit | 10 Bit |
CAN2.0B Nachricht - Extended-Frame
Ein Extended-Frame nach ISO 11898-1 arbeitet mit einem 29-Bit-Identifier. Dadurch stehen über 500 Millionen mögliche Kennungen zur Verfügung. Dieses Format wird in komplexeren Systemen verwendet, in denen eine große Anzahl von Nachrichten erforderlich ist.
| SOF | Identifier A | SRR | IDE | Identifier B | RTR | r1 | r0 | DLC | Data | CRC | ACK | EOF+IFS |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 Bit | 11 Bit | 1 Bit | 1 Bit | 18 Bit | 1 Bit | 1 Bit | 1 Bit | 4 Bit | 0..8 Byte | 16 Bit | 2 Bit | 10 Bit |
Varianten des CAN-Bus und ihre Übertragungsraten
Die Technik umfasst mehrere Varianten, die sich in Geschwindigkeit und Datenkapazität unterscheiden:
- Classical CAN
Diese Version ist der ursprüngliche Standard. Sie unterstützt Datenraten bis zu 1 Mbit/s und überträgt bis zu 8 Byte pro Nachricht. Sie wird in Motorsteuerungen und Getriebesystemen verwendet. - CAN FD (Flexible Data Rate)
Diese Variante erweitert den klassischen Standard. Die Datenrate steigt dynamisch, und die Nutzdatenlänge erreicht bis zu 64 Byte. Diese Variante eignet sich für moderne Fahrzeugarchitekturen, die große Datenmengen benötigen. - >High-Speed CAN
High-Speed arbeitet mit Datenraten zwischen 500 kbit/s und 1 Mbit/s. Er wird für sicherheitsrelevante Systeme wie ABS oder Airbags genutzt. Die Leitungen sind kurz und abgeschirmt, um Störungen zu vermeiden. - >Low-Speed CAN
Low-Speed überträgt Daten mit bis zu 125 kbit/s. Er wird für Komfortfunktionen wie Fensterheber oder Klimaanlagen eingesetzt. Bei Kabelbruch bleibt die Kommunikation eingeschränkt funktionsfähig. - Single-Wire CAN
Diese Variante nutzt nur eine Leitung. Sie reduziert Gewicht und Kosten, eignet sich aber nur für einfache Steuerungen. Die Datenrate ist geringer, und die Störsicherheit ist eingeschränkt.
Unterschiede zu anderen Bussystemen
Im Vergleich zu LIN oder FlexRay bietet der CAN-Bus eine ausgewogene Lösung. LIN ist für einfache Steuerungen mit niedriger Datenrate geeignet, während FlexRay in Systemen mit hoher Bandbreite zum Einsatz kommt. Er wird in zahlreichen Anwendungen verwendet, da er Robustheit und Kosteneffizienz vereint.
Vorteile des CAN-Bus
- Hohe Ausfallsicherheit durch integrierte Fehlererkennung
- Geringer Verkabelungsaufwand
- Flexible Integration zusätzlicher Steuergeräte
- Kosteneffiziente Lösung für komplexe Netzwerke
Einsatzgebiete
Der CAN-Bus wird in Fahrzeugen, Maschinenbau, Medizintechnik und industrieller Automatisierung genutzt. Seine Fähigkeit, mehrere Geräte zuverlässig zu verbinden, macht ihn zu einer bevorzugten Wahl in vielen technischen Anwendungen.